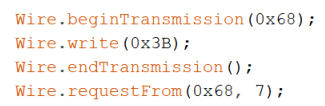
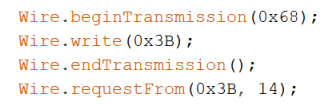
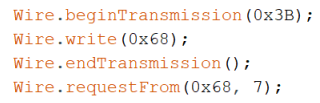
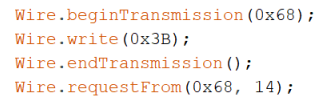
ESP32主控板通过I2C协议读取姿态传感器MPU6050的原始姿态数据,MPU6050的地址为0x68,X轴加速度分量的首地址为0x3B,需要读取X/Y/Z轴的加速度数据、角速度数据和温度数据,下列程序正确的是?( )